概述
此处的缓存非彼之计算机缓存。该缓存主要是降低高并发对数据库冲击,提高数据访问速度、查询命中的数据库缓存。当然也有静态缓存、动态缓存。(这些我只知其名)
缓存的特征
- 命中率(高并发中的重要指标):简单表示为:命中数/(命中数+未命中数);未命中即未通过缓存获取到想要的数据,可能数据不存在或缓存已过期。
- 最大元素(或最大空间):缓存中可以存放的元素数量。一旦缓存中的数据数量超过该值,会触发缓存的清除策略。
- 清空策略:FIFO、LFU(使用频率最小策略)、LRU(最近最少被使用策略)、过期时间、随机清除等。
- FIFO是first in first out,在缓存中最先被创建的数据再被清除时会被优先考虑清除。适用于对数据的实时性要求较高的场景,保证最新的数据可用。
- LFU是无理数据是否过期,通过比较各数据的命中率,优先清除命中率最低的数据。
- LRU是无论数据是否过期,通过比较数据最近一次被使用(即调用get())的时间戳,优先清除距今最久的数据,以保证热点数据的可用性。(多数缓存框架都采用LRU策略)
- 过期时间策略是,通过比较过期时间清除过期时间最长的数据,或通过过期时间,清除最近要过期的数据。
缓存命中率的影响因素
- 业务场景和业务需求:显然,缓存是为了减轻读数据操作的缓冲方式。
- 适用于读多写少的场景。
- 对数据的实时性要求不高。因为数据缓存的时间越长,数据的命中率越高。
- 缓存的设计:粒度和策略
- 缓存的粒度越小,灵活度高,命中率越高;粒度越小,越不易被其他操作(修改)涉及到,保存在缓存中的时间越久,越易被命中。
- 当缓存中的数据变化时,直接更新缓存中的相应数据(虽然一定程度上会提高系统复杂度),而不是移除或设置数据过期,会提高缓存的命中率。
- 缓存容量和基础设施。
- 当然,缓存容量越大,缓存命中率越高。
- 缓存的技术选型:采用应用内置的内地缓存容易造成单机瓶颈,而采用分布式缓存则具有更好的拓展性,伸缩性。
- 不同的缓存框架中的缓存命中率也不尽相同。
- 当缓存结点发生故障,需要避免缓存失效并最大程度地减少影响。可通过一致性hash算法或结点冗余方式避免结点故障。
- 多线程并发越高,缓存的效益越高,即收益越高,即使缓存时间很短。
提高缓存命中率的方法
- 要求应用尽可能地通过缓存访问数据,避免缓存失效。
- 结合上面介绍的命中率影响因素:缓存粒度、策略、容量、技术选型等结合考虑。
缓存的分类
根据缓存和应用的耦合度进行分类:
- 本地缓存:
- 指应用中的缓存组件,主要通过编程实现(使用成员变量、局部变量、静态变量)或使用现成的Guava Cache框架。
- 优点:应用和cache都在同一个进程内部。请求缓存速度快,无网络开销。单机应用中,不需要集群支持时,或集群情况下,各结点不需要互相通知时,适合使用本地缓存。
- 缺点:应用和cache的耦合度高,各应用间无法共享缓存,导致各结点或单机应用需要维护自己的缓存,可能会造成内存浪费。
- 分布式缓存:
- 指的是应用分离的缓存组件或服务,主要现在流行的有:Memcache、Redis。
- 优点:自己本身就是一个独立的服务,与本地应用是隔离的,多个应用可以共享缓存;
Guava Cache介绍
它是本地缓存的实现框架。
原理图如下:
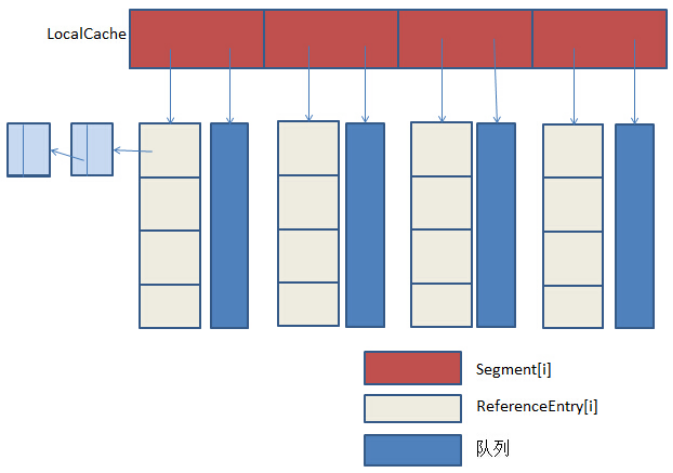
可以看出来,它的实现原理类似ConcurrentHashMap,使用多个segment细粒度锁,既保证了线程安全,又支持高并发场景需求。该类Cache类似于一个Map,也是存储键值对的集合,但它还需要处理缓存过期、动态加载等算法逻辑;根据面向对象的思想,它还需要做方法与数据关联性的封装。
Guava Cache实现的主要功能有:自动将结点加入到缓存结构中;当缓存中结点超过设置的最大元素值时,使用LRU算法实现缓存清除;它缓存的key封装在weakReference(弱引用)中,它缓存的value缓存在weakReference(弱引用)或softReference(软引用)中;它可以统计缓存中各数据的命中率、异常率、未命中率等数据;
Memcache
它是一个高效的分布式内存cache,是众多广泛应用的开源分布式缓存的框架之一。
内存结构图如下:
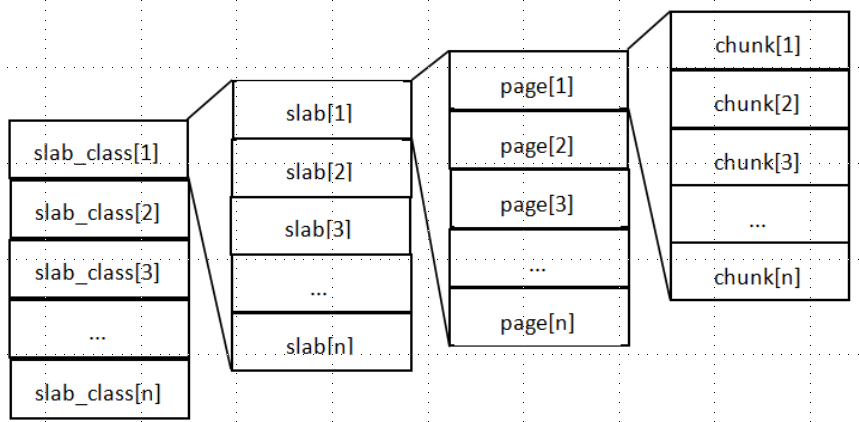
其中涉及到四个部分:按部分作用区域由大到小分别为
- slab_class:板层类。
- slab:板层。
- page:页。
- chunk:块。是真正存放数据的地方。
- 同一个slab内的chunk的大小是固定的。而具有相同chunk的slab被分组为chunk_slab。
- Memcache的内存的分配器成为allocator。其中slab的数量有限,与启动参数的配置有关。
- 其中的value总是会被存放到与value占用空间大小最接近的chunk的slab中,以在不降低系统性能情况下节约内存空间。
- 在创建slab时,首先申请内存;其中是以page为单位分配给slab空间,其中,一般page为1M大小;page按照该slab的chunk大小进行切分并形成数组。
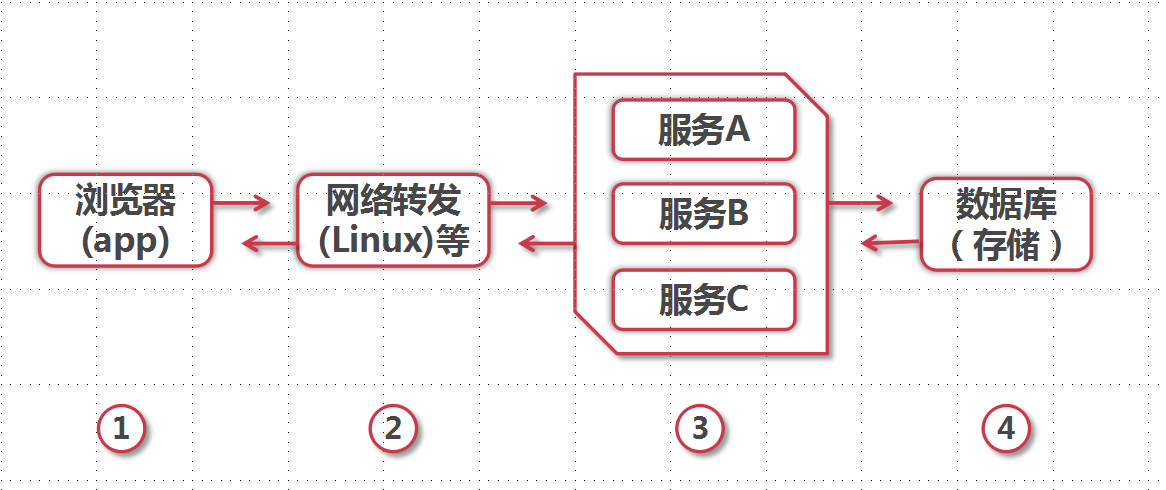
Memcache处理原理图如下:
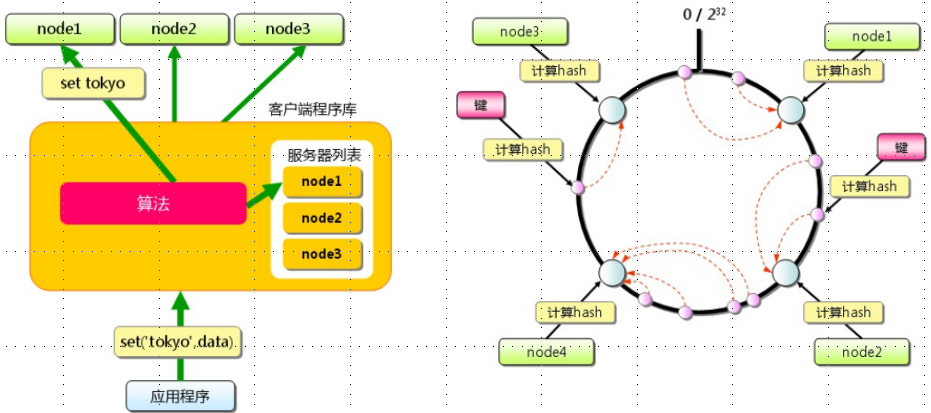
它本身不提供分布式的解决方案。在服务端,Memcache的集群环境实际上就是一个个Memcache服务器的堆积。它cache的分布式机制是在客户端实现。通过客户端的路由来处理,以达到分布式解决方案的目的。
客户端做路由的原理:
- 客户端采用hash一致性算法,上图中右侧即是其路由的计算方法。
- 相对于一般的hash算法,如取模方式,它除了计算key的hash外,还计算每一个server的hash值,最后将这些hash值映射到一个指定域上,如图中的0-2^32。
- 通过寻找大于key的hash值的最小server作为存储该key的目标server,如果未找到则直接将具有最小hash值的server作为目标server。
- 该机制一定程度上解决了扩容问题。增加或删除某个结点对于该集群来说不会有大影响。
- 最近版本中,Memcache又增加了虚拟结点的设计,进一步提高系统可用性
Memcache的内存分配和回收算法
- 在Memcache的内存分配中,chunk空间并不会被value完全占用,总会有内存浪费;
- Memcache的LRU回收算法不是针对全局的,而是slab的。
- Memcache中对允许存放的value占用空间大小有限制。因为内存空间分配是slab以page为单位被分配空间,而page大小规定最大为1M。
Memcache的限制和特性
- Memcache对存储的item数量没有限制;
- Memcache单进程在32位机器上限制的内存大小为2G,即2的32次方的bit。而64位机器则没有内存大小限制。
- Memcache的key最大为250个字节;若超过则无法存储。其可存储的value最大为1M,即page最大可分配的大小,此时page中只分配了(形成)一个chunk。
- Memcache的服务器端是非安全的。当已知一个Memcache结点,外部进入后可通过flushAll命令,使已经存在的键值对立即失效。
- Memcache不能遍历其中存储的所有item。因为该操作会使其他的访问、创建等操作阻塞,且该进程十分缓慢。
- Memcache的高性能来源于两个阶段的hash结构:第一个是客户端(该hash算法根据key值算出一个结点);第二个是服务端(通过一个内部的hash算法,查找真正的item并返回给客户端)。
- Memcache是一个非阻塞的基于事件的服务程序。